Smart tiny robotics

Sponsored by
Sponsored by
The Soft Matter Engineering Laboratory led by Prof Iek Man Lei uses 3D printing technology to fabricate soft materials
Inspired by the remarkable agility of insects in nature, researchers at the University of Macau (UM) have developed tiny robots that possess both terrestrial and aquatic mobility. Combining innovative material design with precision microfabrication techniques, these centimetre-scale devices can perform complex macroscopic tasks, constructing a cross-scale bridge in the field of robotics.
Intelligent tiny robots show great promise in disaster response. In the aftermath of disasters such as earthquakes or water pollution events, these robots, which carry various sensors, can carry out search-and-rescue operations and collect and transmit critical field data. However, developing the relevant technology currently faces a myriad of challenges in terms of miniaturisation, material design, intelligent control systems, and agile mobility across mixed terrains. To address these challenges, laboratories led by Iek Man Lei and Junwen Zhong, assistant professors in the Centre for Artificial Intelligence and Robotics at UM, have proposed innovative solutions.
The Soft Matter Engineering Laboratory, led by Prof Lei, focuses on developing next-generation functional soft materials using innovative approaches such as 3D printing, direct ink writing, and bioinspired techniques. By combining advanced manufacturing techniques, bioinspired architectural designs, and innovative materials, the research team aims to address the long-standing challenges in human-machine interfaces and bring innovations to soft matter science, healthcare, and robotics.
In their latest breakthrough, the research team developed an innovative ice-templating method for engineering hydrogels with circumferentially aligned fibres that mimic natural systems such as intervertebral discs and arteries. Enhanced by rotary compression annealing, these hydrogels exhibit extraordinary mechanical properties, including high tensile strength, superior isotropic fatigue resistance, ultra-compressibility, and exceptional burst pressure. They outperform conventional tough hydrogels and have enabled the development of a durable, untethered bioinspired robotic fish powered by an antagonistic pair of hydrogel actuators. Each actuator consists of a hydrogel chamber that is connected to a valve, a pressure sensor, and an air pump. These components work together to generate alternating pressurisation, producing the undulating motion of a fish’s tail. Thanks to the excellent mechanical properties of the hydrogels, the robotic fish can achieve high-force actuation while maintaining long-term durability. Moreover, from an environmental protection perspective, this approach eliminates the need for hard components or high-speed rotation in order to achieve propulsion and diving. This ensures a gentle interaction with marine animals and minimises harm to ecosystems. The study was published in Science Advances (2025) under the title ‘Concentric ice-templating of ultracompressible tough hydrogels with bioinspired circumferentially aligned architecture’.
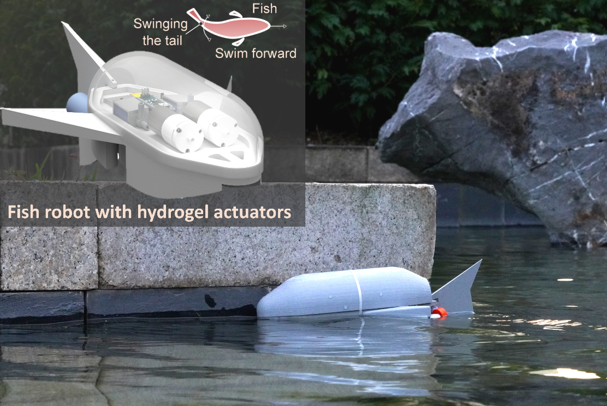
The eco-friendly, durable fish robot developed by the Soft Matter Engineering Laboratory led by Prof Iek Man Lei is equipped with tough hydrogel actuators
The Soft Sensors-Actuators-Robots Laboratory, led by Prof Zhong, specialises in advanced electromechanical transduction technologies. They have developed high-performance sensors and actuators with dual applications in haptic feedback-based human-machine interactive devices and insect-scale robots driven by the piezoelectric principle. The laboratory’s research integrates materials science, electronics, mechanical engineering, and robotics, demonstrating its multidisciplinary nature.
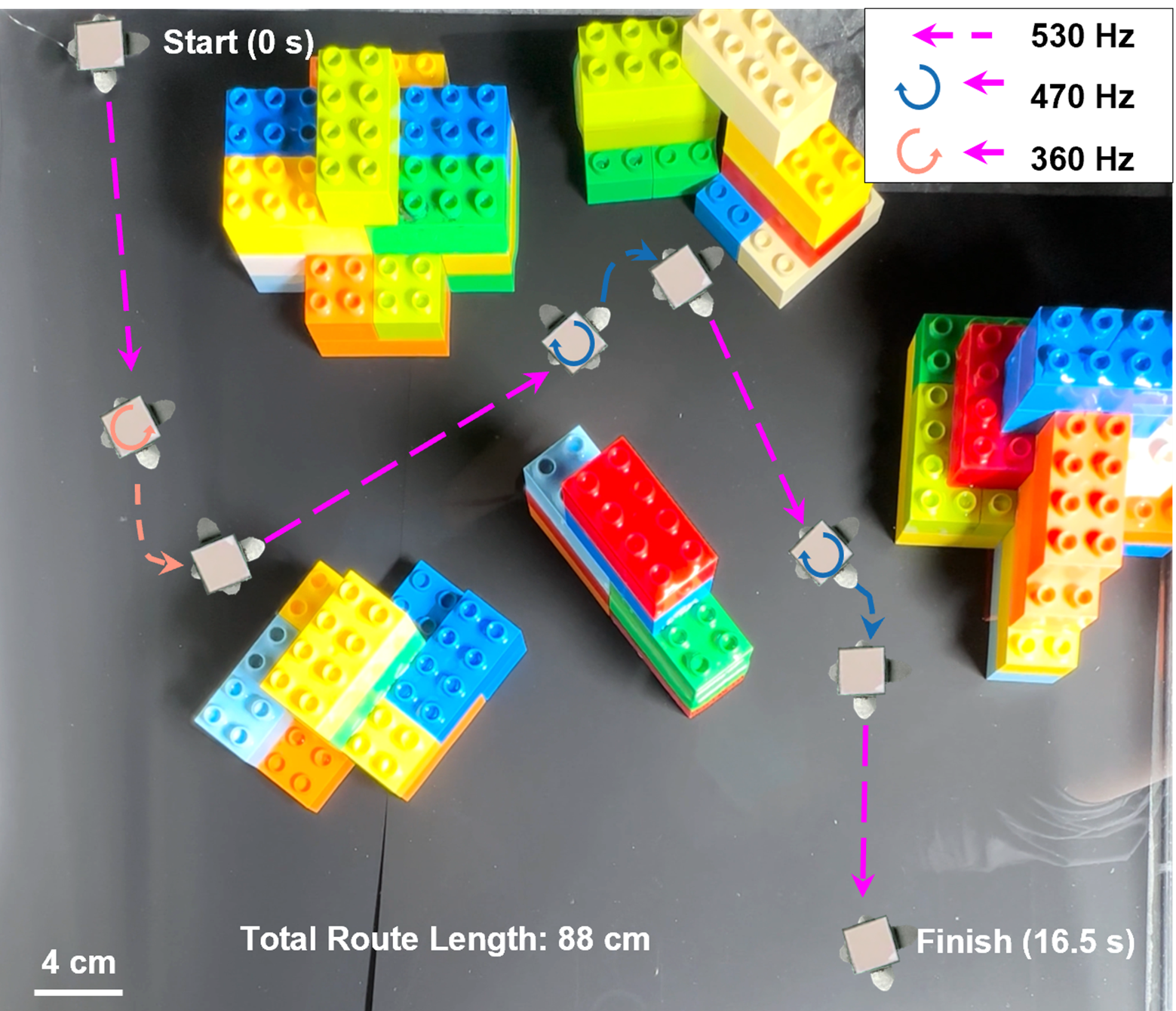
In their first landmark study, Prof Zhong’s research team developed an insect-scale soft robot that combines resonant piezoelectric actuation and electrostatic footpads to achieve remarkable agility. By leveraging the electrostatic adhesion between the footpads and the ground, the 65-milligram tethered insect-scale robot can achieve both rapid movement and precise rotation. It even outperforms cockroaches in terms of manoeuvrability and can navigate a 120-centimetre maze in just 5.6 seconds.
To enable broader applications, the research team integrated ultralight circuit boards and onboard gas sensors to create a tiny untethered robot capable of mapping gas concentrations in complex environments. This advancement demonstrates the robot’s potential for use in post-disaster rescue missions, as it could locate survivors or hazardous leaks in collapsed structures. The team’s innovations in precise trajectory control and hardware miniaturisation for sub-gram untethered systems were published in Science Robotics (2021) under the title ‘Electrostatic footpads enable agile insect-scale soft robots with trajectory control’.
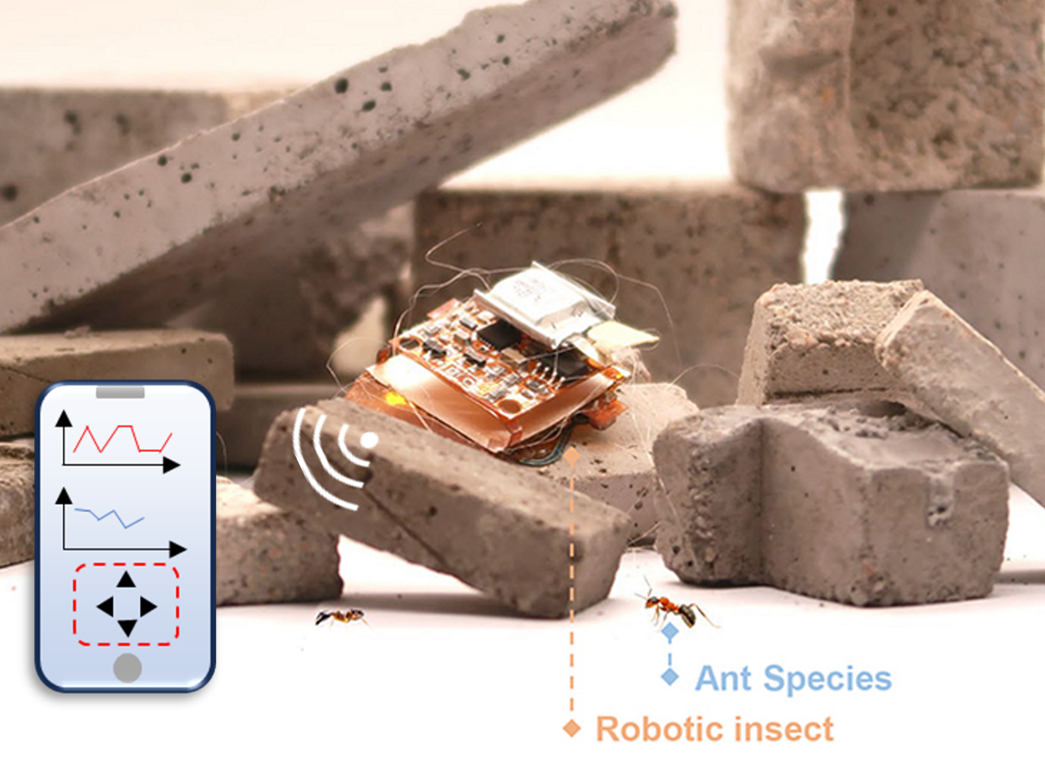
The untethered insect-scale robot developed by the Soft Sensors-Actuators-Robots Laboratory led by Prof Junwen Zhong can be used in post-disaster rescue operations
Having advanced the manoeuvrability of insect-scale soft robots in terrestrial environments, Prof Lei and Prof Zhong’s research teams then turned their attention to aquatic environments. They have recently developed a fast-moving, steerable aquatic surface robot inspired by water striders. This tiny robot uses innovative piezoelectric actuation coupled with asymmetric footpad structures to glide effortlessly across water surfaces without breaking the air-water interface. Its performance is on a par with that of its previous terrestrial versions. With a record speed of 21.82 body lengths per second (24 cm/s) and precise directional control at an angular velocity of 303°/s, the robot outperforms all existing counterparts in its size class. In addition to laboratory demonstrations, the robot has promising real-world applications: in simulated rescue scenarios, the robot successfully towed a monitoring system and transmitted real-time ‘SOS’ signals. This research establishes the fundamental design principles for the next generation of micro-aquatic robots, opening up new possibilities for environmental monitoring, search-and-rescue missions, and other water-based tasks where miniaturisation and precision are paramount. The research, title ‘Bio-Inspired Fast-Moving and Steerable Insect-Scale Soft Aquatic Surface Robot’, was published in IEEE Transactions on Robotics (2025).
An insect-scale robot designed for aquatic environments, jointly developed by the laboratories led by Prof Iek Man Lei and Prof Junwen Zhong
In addition to their pioneering research, the laboratories led by Prof Lei and Prof Zhong are actively involved in outreach initiatives that connect academia with the community. One notable example is their ongoing collaboration with primary and secondary schools in Macao, where they organise summer camps and laboratory tours for younger students. These activities aim to stimulate young people’s interest in science, provide them with early exposure to STEM subjects, and ultimately nurture future technology and engineering professionals for Macao and beyond.

Prof Iek Man Lei

Prof Junwen Zhong