Runwei Li's Team | Enhancing Tactile Sensitivity in Robotics
Scientists reviewed advances in magnetic tactile sensors that detect forces through magnetic field changes. The work outlines materials, structures, and challenges for enabling robots with human-like touch.
Sponsored by

Sponsored by
Close your eyes and draw a finger across a surface—you can instantly discern the coolness of glass, the grain of wood, or the softness of fabric. This innate human capability, known simply as "touch" , is now emerging as a sensory modality that researchers are actively working to impart to robotic systems.
Future surgical robots could sense vascular pulsation. Prosthetic limbs could provide amputees with realistic haptic feedback during grip. Even smartphone screens might one day allow users to distinguish icons by texture alone. Underpinning these possibilities is an evolving sensing technology: magnetic tactile sensing.
A team led by Professor Runwei Li, Chair Professor at the Eastern Institute of Technology, Ningbo (EIT), has systematically reviewed recent progress in magnetic tactile sensing materials and devices. Their work delineates the developmental trajectory and identifies key scientific questions in the field, encompassing material composition, structural design, and device operational mechanisms. This research establishes a foundation for endowing robots with more discerning tactile capabilities.
The relevant research has been published in the Review of Materials Research.
The Rationale for Magnetic Approaches
Conventional tactile sensors often operate analogously to pressure switches—closing a circuit upon mechanical contact. Magnetic tactile sensing employs a fundamentally different mechanism. Rather than directly transducing pressure, it infers external forces through magnetic field distortion.
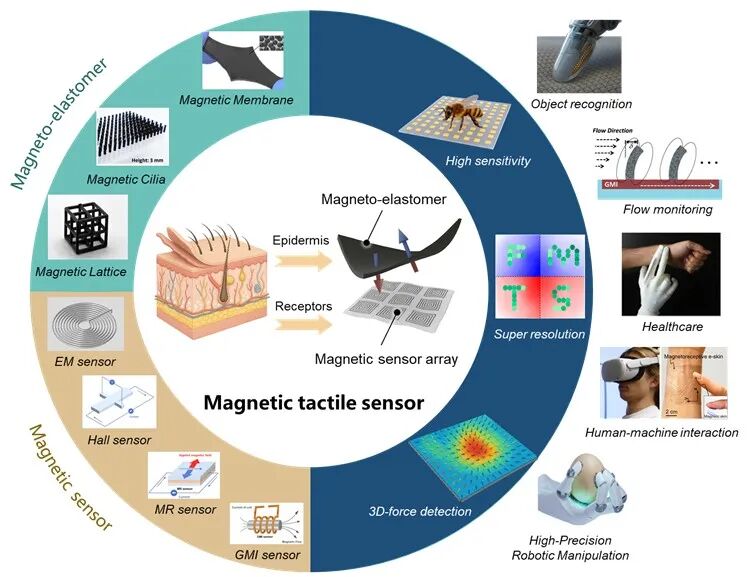
Key components, characteristics, and potential applications of magnetic tactile sensors. Image provided by the research group.
This strategy offers several intrinsic advantages:
Effective Signal Decoupling: Magnetic sensing enables operation across an air gap. The magnet and sensing element need not be in direct contact; they can function with an intervening protective layer, facilitating waterproof and corrosion-resistant device architectures.
High Environmental Robustness: Magnetic tactile systems remain largely unaffected by contaminants such as water, oil, or dust. This stability is particularly valuable in industrial automation and medical contexts.
Design Versatility: The approach is compatible with flexible, stretchable, and encapsulated systems.
Multidimensional Force Sensing: While conventional sensors typically measure only force magnitude, magnetic configurations can resolve force direction—distinguishing compressive, tensile, and torsional loading. This multidimensional capability is essential for dexterous manipulation tasks.
The Role of Composite Formulation
A prevalent material strategy involves embedding permanent magnet particles within an elastomeric matrix to generate magnetic field variations under mechanical deformation. By incorporating magnetic particles into a soft silicone or elastomer, researchers create a deformable, resilient composite—a magneto-elastomer.
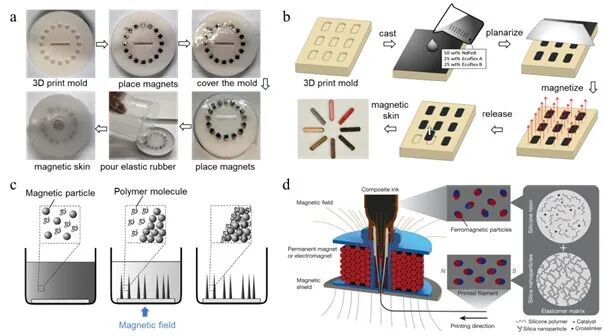
Embedding bulk permanent magnets within an elastic polymer matrix. Image provided by the research group.
When an external force deforms this material, the spatial distribution of the embedded particles changes, thereby perturbing the surrounding magnetic field. A nearby magnetic sensor detects these field variations, enabling reconstruction of the applied force vector.
However, sensor performance depends critically on formulation: particle type, concentration, and spatial arrangement directly influence sensitivity and stability. Excessive loading stiffens the matrix; insufficient loading yields weak signal output. Random particle orientation produces irregular magnetic field responses.
This is precisely the focus of Professor Runwei Li's team: engineering an integrated system encompassing composition, microstructure, and processing, rather than merely selecting materials.
Structural Design as a Performance Determinant
Professor Runwei Li emphasizes that magnetic tactile sensor performance is not governed solely by intrinsic material parameters but is highly dependent on structural engineering. Synergistic design of material and architecture is essential for advancing magnetic tactile sensors from proof-of-concept toward deployment in complex systems.
For instance, patterning the surface of a magnetic film with micro-pyramid arrays or micro-pillar structures concentrates deformation under load, enhancing local magnetic field perturbations and yielding substantially improved sensitivity.
Furthermore, component geometry matters. A configuration with the magnet positioned above the sensing chip yields different signal characteristics compared to a side-by-side arrangement. Sophisticated design can enable single-sensor multi-parameter detection, where a single touch event simultaneously yields data on normal pressure, shear force, and torsion angle.
From Laboratory Demonstration to Practical Application
Although laboratories can now produce magnetic tactile films with compliance comparable to skin and sensitivity sufficient to detect millimeter-scale indentation, several substantial hurdles remain before widespread adoption:
Stability: Can the magnetic properties of the composite endure hundreds of thousands of loading cycles without degradation? Will the elastomer exhibit mechanical fatigue under repeated deformation?
Manufacturability: While manual assembly suffices for prototyping, ensuring consistent magnetic characteristics across devices in high-volume production remains challenging.
Integration: Achieving an optimal balance among flexibility, sensitivity, and low power consumption requires navigating inherent trade-offs.
Future advances will continue to depend on the deep integration of magnetic material design, flexible structural engineering, and device-level integration strategies.
Returning to the fundamental question: why endow robots with a sense of touch?
Touch constitutes a foundational modality through which humans perceive and interact with the physical world. A robot without touch resembles a surgeon operating through thick gloves—capable of observation, but hesitant to apply precise force. Magnetic tactile sensing, with its immunity to environmental interference, sensitivity to force direction, and structural flexibility, offers a compelling pathway to address this limitation.
From optimizing magneto-elastomer formulations, to engineering microstructures with precision, to integrating flexible electronic readouts, Professor Runwei Li's team charts a clear trajectory: materials as the foundation, structure as the lever, and application as the destination.
Perhaps sooner than we anticipate, when you shake hands with a robot, you might be surprised to sense the warmth of its palm.
Jiafeng Wu, a Ph.D. student from the Ningbo Institute of Materials Technology and Engineering, Chinese Academy of Sciences, is the first author of the paper. Professor Runwei Li is the corresponding author. Collaborators also include Professor Huali Yang from the Ningbo Institute of Materials Technology and Engineering, Chinese Academy of Sciences.
This work was supported by the National Key R&D Program of China, National Natural Science Foundation of China, Natural Science Foundation of Zhejiang Province, the Ningbo Key Scientific and Technological Project, and the Youth Science and Technology Innovation Leading Talent Project of Ningbo.
Link: https://doi.org/10.1016/j.jmat.2025.100110