Rethinking structural control systems
At Samara State Technical University, scientists are improving the accuracy and operating speed of control systems used in space
In construction, the main purpose is usually to create a structure that resists loads while withstanding deformation. Such a traditional structure is characterised as passive, in the sense that it lacks mobility. In the early 1980s, as a result of advancements in space technology, the idea of active structures with adjustable sizes arose. These new shapes could be adjusted to counteract the effect of external disturbances.
Researchers at Samara State Technical University (Samara Polytech) are developing a new static shape for a modal control strategy. Modal control is the most effective strategy for distributed parameter systems, since most controlled structures are modelled as distributed parameter systems by means of, for example, the finite element method. The advantages of modal control are that orthogonal modes do not interact with each other. They can be controlled independently, improving the accuracy and operating speed of the control system.
The modal control strategy is already being successfully used in structural dynamics. But while methods of modal control, based on the natural frequency mode of the structure, provide high accuracy in controlling the processes of dynamic deformation, they are not applicable for control of quasi-static deformation. The natural frequency modes of the structure depend on the real distribution of the mass in the volume of the structure, while in the case of quasi-static loading, the inertia-mass characteristics have no effect on displacements induced by force actuators.

Professor Yakov Klebanov (pictured above) and his team from the mechanics department at Samara Polytech have developed a new method for structure deformation control. It is the simplest way of determining the orthogonal natural modes of quasi-static deformation of a structure with local force control. The method involves forming a digital twin, which is a digital replica of the quasi-static stress state of the controlled structure. The digital twin has the same shape and elastic properties as the structure under consideration but has zero density except for concentrated unit masses attached at points corresponding to force actuators on the structure. These masses are taken into consideration only in the application of forces or displacements exerted by actuators. The zero-density digital twin eliminates the influence of inertia-mass characteristics; the inertial forces of the unit masses reproduce the actuator action.
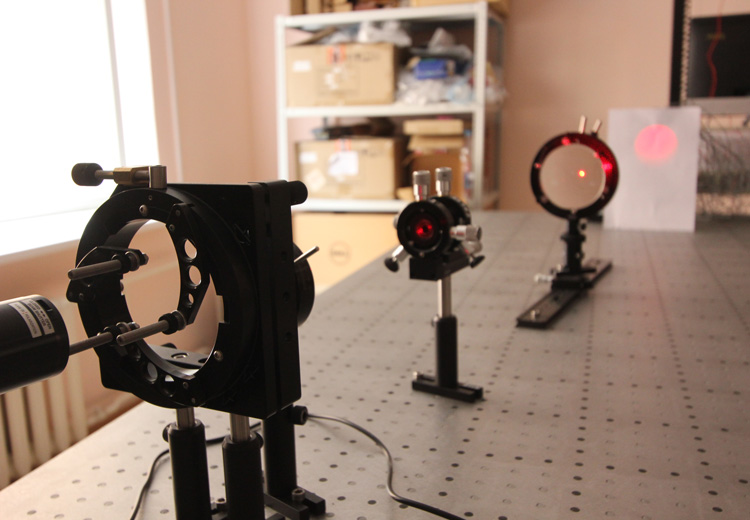
Professor Klebanov’s project has already delivered results, including a working active mirror that reduces distortion and increases the resolution of space telescopes. “We set the telescope mirror in any form required to compensate for the aberrations in the entire optical system. Here, we talk about the opportunity to move the surface of the mirror by microns, even shares of microns. This allows us to get rid of optical distortions,” explains Professor Klebanov.
The improvement in the image quality and resolution of telescopes can be achieved by increasing the size of the mirror. However, the larger the size, the greater the potential problems. The background temperature of a satellite in orbit is constantly changing, and changing the temperature of the telescope by just a few degrees can worsen the quality of the resulting image.
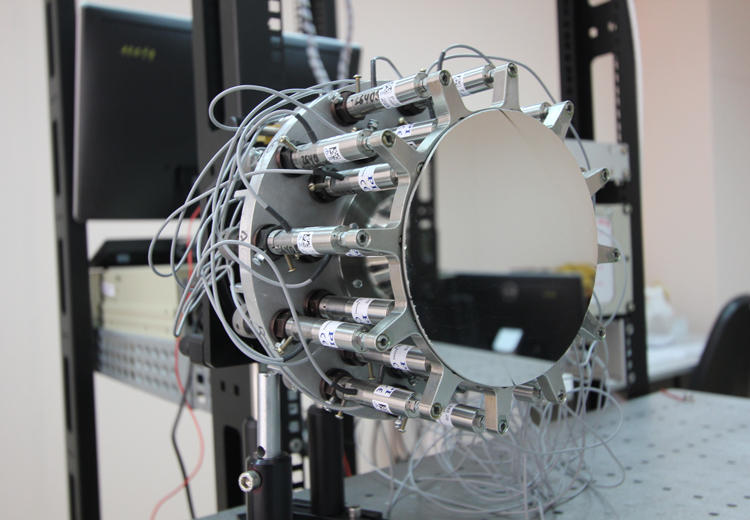
Moreover, a large telescope is more difficult to place on board a spacecraft. The work done by Samara Polytech’s scientists means the telescope mirror is not attached to a rigid base, but to a system of portable piezo actuators. These devices are led by computer signals and deform the mirror by shares of a micron in the places required, meaning that the distortions of the image disappear. The invention is already patented in Russia and the US.
The system is able to reconfigure in a split second and can be used in space and on Earth. Samara Polytech’s scientists have also developed software to control the system. The engineering work was supported by the Innovative Territorial Aerospace Cluster of Samara Region. A grant for the work was provided by the Russian Foundation for Basic Research. Samara’s scientists hope that these flexible mirrors will improve the optical resolution of observation satellites.
A significant driving force for the researchers at Samara is to develop technologies that make a difference to local industrial enterprises. The university, in cooperation with Stan-Samara, a manufacturer of coordinate boring machines, developed a high-precision tilting rotary table equipped with actuators and sensors. For various finishing operations, the workpieces are based and fixed on the faceplate of this table.
The precision table design takes full advantage of the new method for structure deformation control. Compared with previous methods, the modal analysis of the digital twin allows for determining fields of all the stress-strain state parameters: stresses, strains and displacements of the entire structure. Actuators can cause changes in the shape or size of the structure not related to the controlled parameters, whereas the modal method allows researchers to monitor all fields. Once the required coefficients of natural modes have been obtained, the changes in shape and size caused by the actuators can easily be calculated as a superposition of the changes in the shape and size of the corresponding natural modes of the simulator. They can then be compared with the respective allowable values.
Each natural mode of the simulator also contains the stress tensor field of the whole structure. Their superposition is the stress field caused by the actuators; no additional modelling is required. The total stress field – including stress fields caused by actuators, technological loads, own weight, assembly tension and other factors – has not to exceed the allowable stress level.
Find out more about the Innovative Territorial Aerospace Cluster of Samara Region.